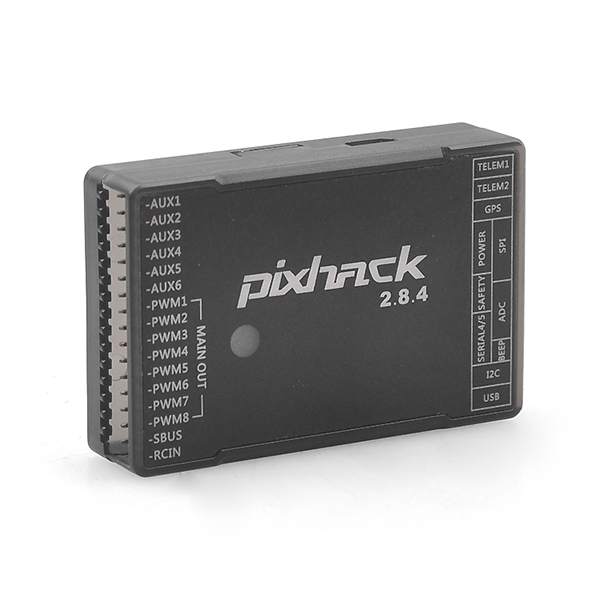
This PIXHACK 2.8.4 flight control is simplified and optimized based on PIXHAWK flight control, some rarely used ports are eliminated.
One of the major features of this version is that the IMU unit is separated from main control unit, the IMU adopts floating mounting structure which can greatly reduce affection from vibration.
PIXHACK 32-bit Open Source Autopilot Flight Controller V2.4.8
Processor- 32bit STM32F427 Cortex M4 core with FPU;
- 168 MHz
- 256 KB RAM
- 2 MB Flash
- 32bit STM32F103 failsafe co-processor
Sensor- L3GD20 3-axis 16 bit gyroscope
- LSM303D 14 bit accelerometer / magnetometer
- MPU 6000 6-axis accelerometer/gyroscope
- MEAS MS5611 barometer
Parameters:- Weight: 33g
- Dimension: 69*45*16mm
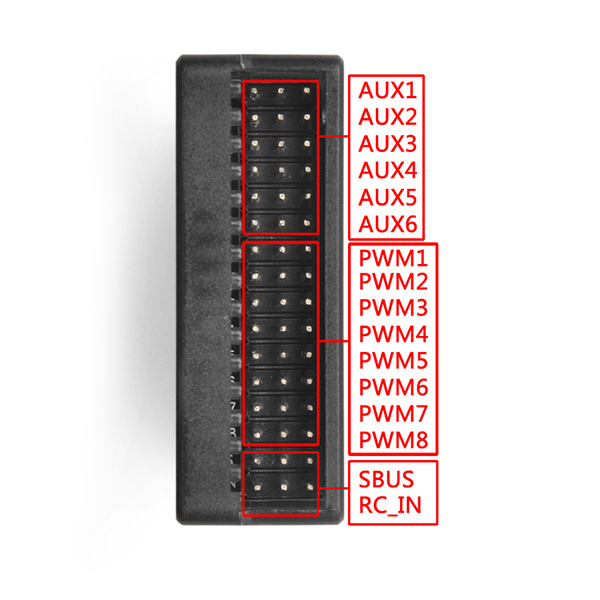
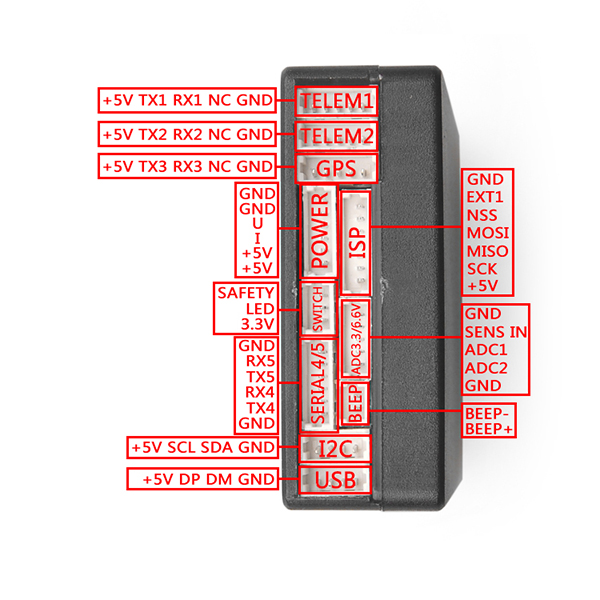
Interface:
1. Futaba SBUS compatible input
2. PPM signal input
3. PWM signal output
4. I2C port (x 1)(1.25mm spacing, 5pin JST socket)
5. Telemetry port (x2) (1.25mm spacing, 5pin JST socket)
6. Power module port (x 1) (1.25mm spacing, 6pin JST socket)
7. GPS port (x 1) (1.25mm spacing, 5pin JST socket)