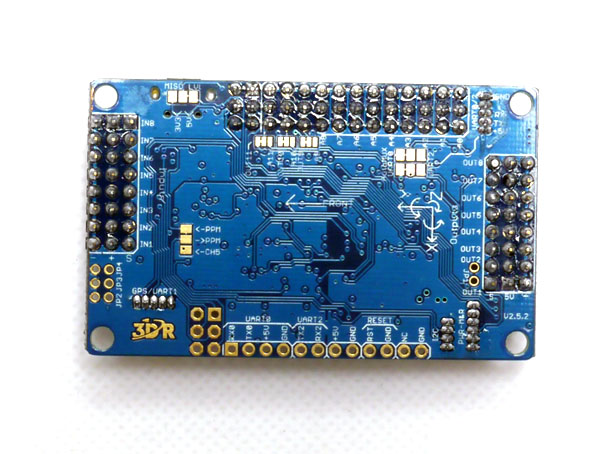
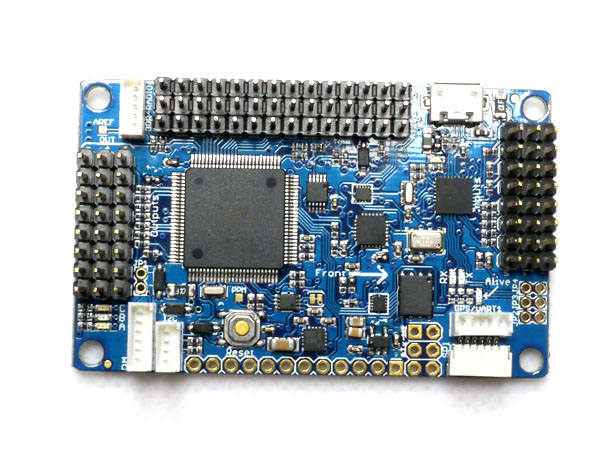
-APM 2.5 is Upgarde version of APM2.0,and there’s NO difference in performance at all between the two, the board is still the same in terms of functionally and it runs exactly the same code as APM 2.0. We just took the liberty of throwing in a few new universal connectors in there (so accessories can be cross compatible with the new PX4 and protect the user from connecting the cable in the wrong direction), some production improvements that will allows to manufacture it faster and finally we added some protection features to protect it from those reverse polarity/short circuit lovers.
Feature compared with APM 2.0-No more shield/daughterboard: magnetometer and dataflash were moved to the main board, making it easier to assemble, repair and hack.
-No more on-board GPS, but we added a new 6-pins DF13 connector for our new GPS cable standard (PX4) and kept the old but reliable Molex (EM-406) connector for old GPS compatibility.
-The old radio-modem connector is gone and now is being replaced by our new 6-pins DF13 connector (like the GPS, because both are UART’s. Got it?), this will make it compatible with PX4 and prevents users from blowing up the UART mux.
-We added a second protection fuse and diode (you are no longer required to solder it yourself) for extra reverse polarity and short circuit protection.
-The old I2C connector is gone and has been replaced by our new 4-pins DF13 connector (yeah PX4 compatible. Oh wait correction… None of both (PX4 & APM2.5) are compatible with each other, we created this standard together as a team, but I have to give the average of the credits to PX4).
-Added a “mystery” 6-pin DF13 Connector that will be used later. I know you like surprises so please stay tuned. No big deal but is really cool and will save you some soldering here and there.
-Added “Magnetometer Jumper” that allows you to disable the on-board magnetometer, so you can attach an external one.
-Added extra LED attached to the PPM encoder (Atmega32-U2) on pin PC7. This will allows us later to use it as PPM status indication and leave those poor TX/RX LED’s do their intended job.
* This flight controller needs customers having rich experience and great patience in tuning and using it, it is not suggested for new beginners. * For more information or trouble shooting, please refer to the following links:
https://code.google.com/p/arducopter/wiki/ArduCopter?wl=en
https://code.google.com/p/ardupilot-mega/wiki/APM2board?wl=en